{kind=link}
Description: PNG image
|
| From: | Joseph Muhlhausen |
| Subject: | Re: [Paparazzi-devel] Plane drops after take off on energyadaptative loop |
| Date: | Tue, 23 Feb 2016 07:44:55 -0500 |
Hi,
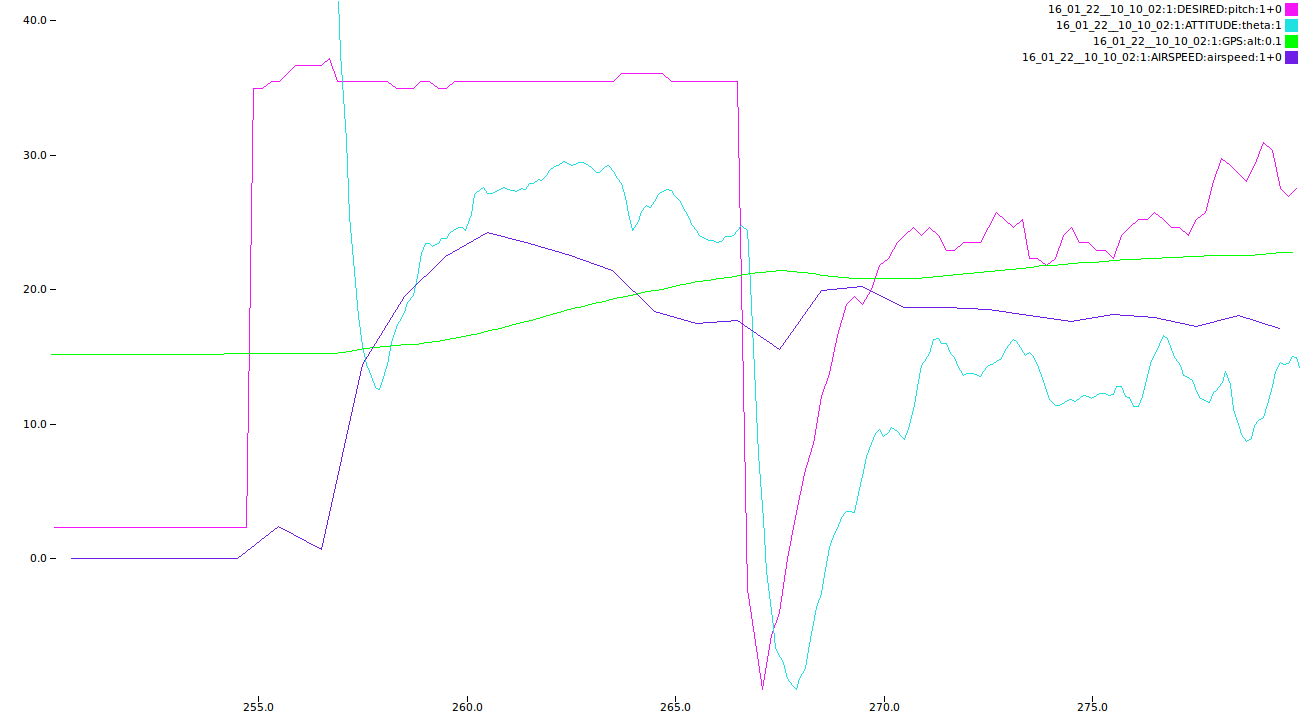
Can you plot the desired pitch angle? What are the nominal pitch and throttle defined in your airframe file?
It looks like the initial pitch angle is way too low and it takes quite long before the integrator fixes this.
To me it does not look like a too low diff gain at all.
On Feb 23, 2016 05:58, "Joseph Muhlhausen" <address@hidden> wrote:Hi Gautier,The airspeed setpoint was 17 m/s and my energy gains are:<define name="ENERGY_TOT_PGAIN" value="0.18"/><define name="ENERGY_TOT_IGAIN" value="0.3"/><define name="ENERGY_DIFF_PGAIN" value="0.18"/><define name="ENERGY_DIFF_IGAIN" value="0.25"/>I move from the standard control loop to the energyadaptative loop because of trouble with altitude control on the standard loop. If nobody is using energy or total energy, I may as well move to a loop used by many so I can get some advice. What airspeed control loop are you using on fixed wing?Thanks!JosephOn Mon, Feb 22, 2016 at 3:59 PM, Gautier Hattenberger <address@hidden> wrote:Hi,
I have never really used it a actually. You probably have the gain energy_diff_pgain a bit to high. When the airspeed drops, it pitch down to gain airspeed. What was your actual airspeed setpoint?
Gautier
Le 22/02/2016 19:07, Joseph Muhlhausen a écrit :
JosephThanks,Gautier or Christophe any suggestion on how to avoid this behavior?Thanks Felix,I have looked more closely at the logs and I think the plane drops because the airspeed drops when transitioning to the STANDBY block (see screenshot).
On Sat, Feb 20, 2016 at 1:12 PM, Felix Ruess <address@hidden> wrote:
Cheers, FelixSo maybe Gautier or Christophe can help out here?Hi Joseph,to be honest I don't know much about the energy control loop and I haven't been flying fixedwings in a long time...
On Fri, Feb 19, 2016 at 6:58 PM, Joseph Muhlhausen <address@hidden> wrote:
_______________________________________________Hi everyone,
I am having some issues with my take off since I switch to the energyadaptative control loop.I take off in automatic using the following:
<block group="home" key="R" name="AUTOTAKEOFF" strip_button="AutoTakeoff"><exception cond="GetPosAlt() > ground_alt+15" deroute="climb"/><set value="0" var="kill_throttle"/><set value="0" var="autopilot_flight_time"/><attitude pitch="45" roll="0" throttle="1" vmode="throttle"/></block><block group="home" key="R" name="climb"><exception cond="GetPosAlt() > ground_alt+50" deroute="Standby"/><attitude pitch="35" roll="0" throttle="0.70" vmode="throttle"/></block><block group="home" key="Ctrl+a" name="Standby" strip_button="Standby" strip_icon="home.png"><circle radius="nav_radius" wp="STDBY"/></block>
When the AP switch to standby, the plane drops from the sky and catches up quickly and the rest of the flight is normal. I'm using umarim lite 2.0 on a fixed delta wing with v5.4.2_stable-3-gc8d866b-dirty and I attached my last flight log.
Best,
Joseph
Paparazzi-devel mailing list
address@hidden
https://lists.nongnu.org/mailman/listinfo/paparazzi-devel
_______________________________________________
Paparazzi-devel mailing list
address@hidden
https://lists.nongnu.org/mailman/listinfo/paparazzi-devel
_______________________________________________ Paparazzi-devel mailing list address@hidden https://lists.nongnu.org/mailman/listinfo/paparazzi-devel
_______________________________________________
Paparazzi-devel mailing list
address@hidden
https://lists.nongnu.org/mailman/listinfo/paparazzi-devel
_______________________________________________
Paparazzi-devel mailing list
address@hidden
https://lists.nongnu.org/mailman/listinfo/paparazzi-devel
_______________________________________________
Paparazzi-devel mailing list
address@hidden
https://lists.nongnu.org/mailman/listinfo/paparazzi-devel
![]() energycontrol_desired_pitch.png
energycontrol_desired_pitch.png
Description: PNG image
| [Prev in Thread] | Current Thread | [Next in Thread] |