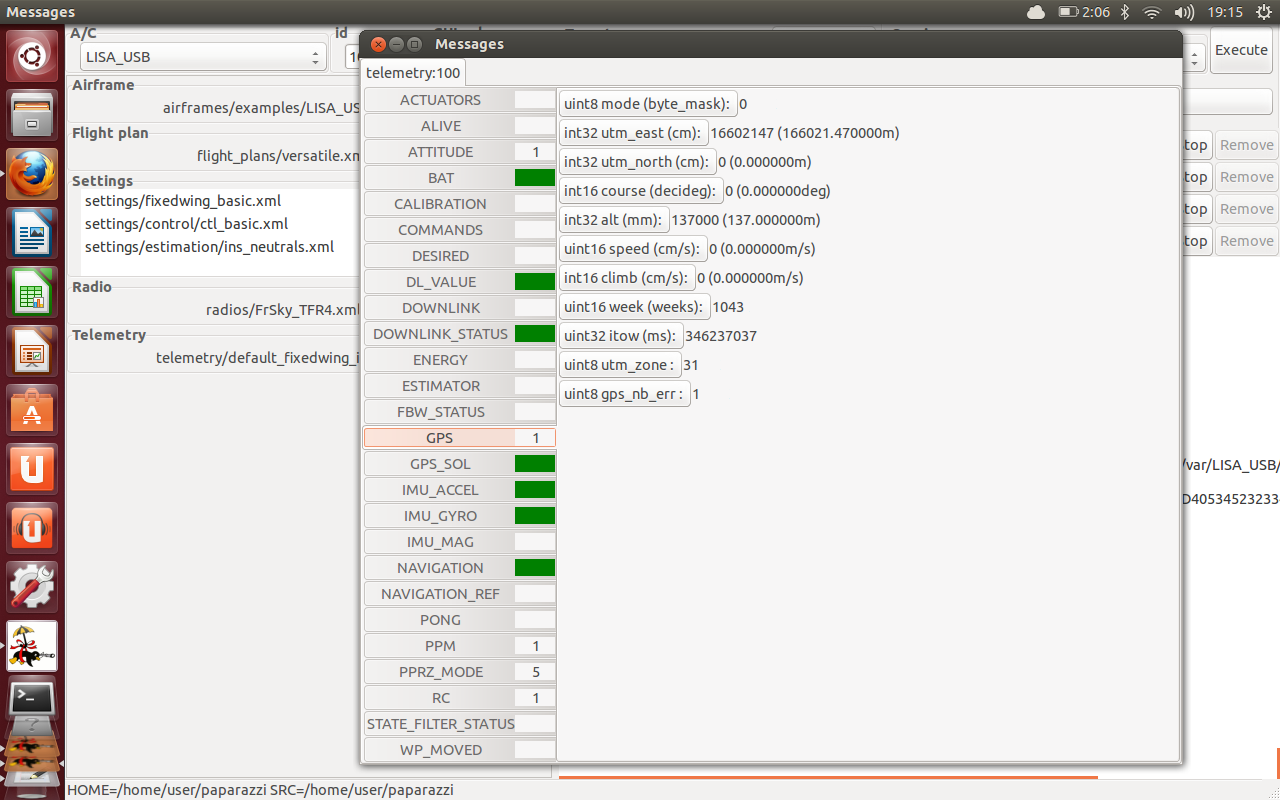
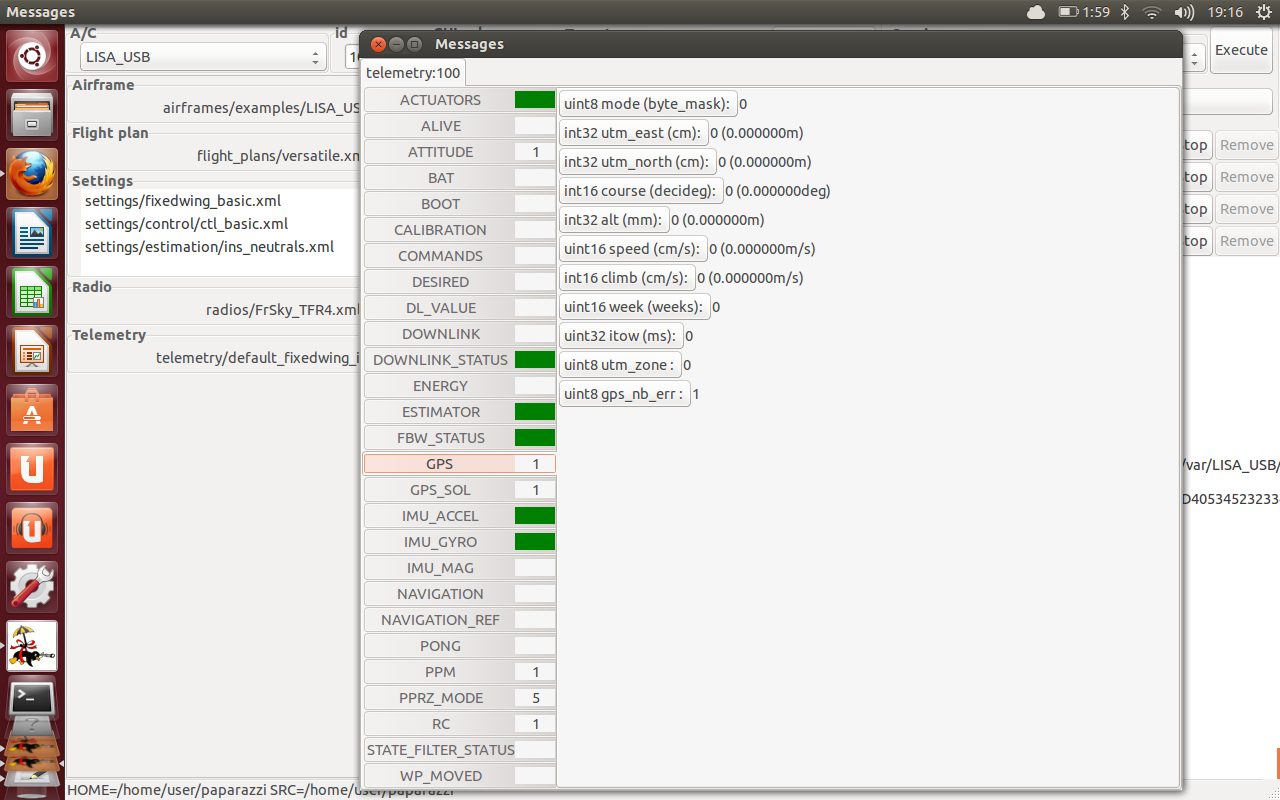
Hi to all...i connect a diydrones mediatek MT3329 to lisa board in default port (UART3)..the gps have a firmware version 1.6 but the gps no fix... i test only connect 5v and gnd to the gps and the led fix in 45sec.. i connect to ftdi cable and view the data in serial terminal..check and double check the connection and see it's all correct..test the gps in arduino mega and fix and data correct...test the lisa in ppz gcs message windows and the gps send data...disconnect the gps and no data...attached is part of my file configuration..and pictures of my message telemetry...
its possible to any help me waith this..Thanks for your's attention
best regards<airframe name="LISA_USB">
<firmware name="fixedwing">
<target name="ap" board="lisa_m_2.0">
<!-- higher frequency for aspirin imu, ouputs data at 100Hz -->
<configure name="PERIODIC_FREQUENCY" value="120"/>
<configure name="AHRS_PROPAGATE_FREQUENCY" value="100"/>
<configure name="AHRS_CORRECT_FREQUENCY" value="100"/>
<define name="AHRS_TRIGGERED_ATTITUDE_LOOP"/>
</target>
<target name="sim" board="pc"/>
<define name="USE_MAGNETOMETER" value="FALSE"/>
<define name="TELEMETRY_MODE_FBW" value="1"/>
<subsystem name="radio_control" type="ppm"/>
<configure name="RADIO_CONTROL_PPM_PIN" value="SERVO6"/>
<subsystem name="telemetry" type="transparent"/>
<subsystem name="control"/>
<subsystem name="imu" type="aspirin_v2.1"/>
<subsystem name="ahrs" type="float_dcm"/>
<subsystem name="gps" type="mediatek_diy"/>
<subsystem name="navigation"/>
<subsystem name="ins" type="alt_float"/>
</firmware>