|
| From: | Florian Kiera |
| Subject: | Re: RTK Base and its accuracy |
| Date: | Thu, 18 Aug 2022 10:45:58 +0200 |
| User-agent: | Mozilla/5.0 (X11; Linux x86_64; rv:91.0) Gecko/20100101 Thunderbird/91.12.0 |
Hey Gary,
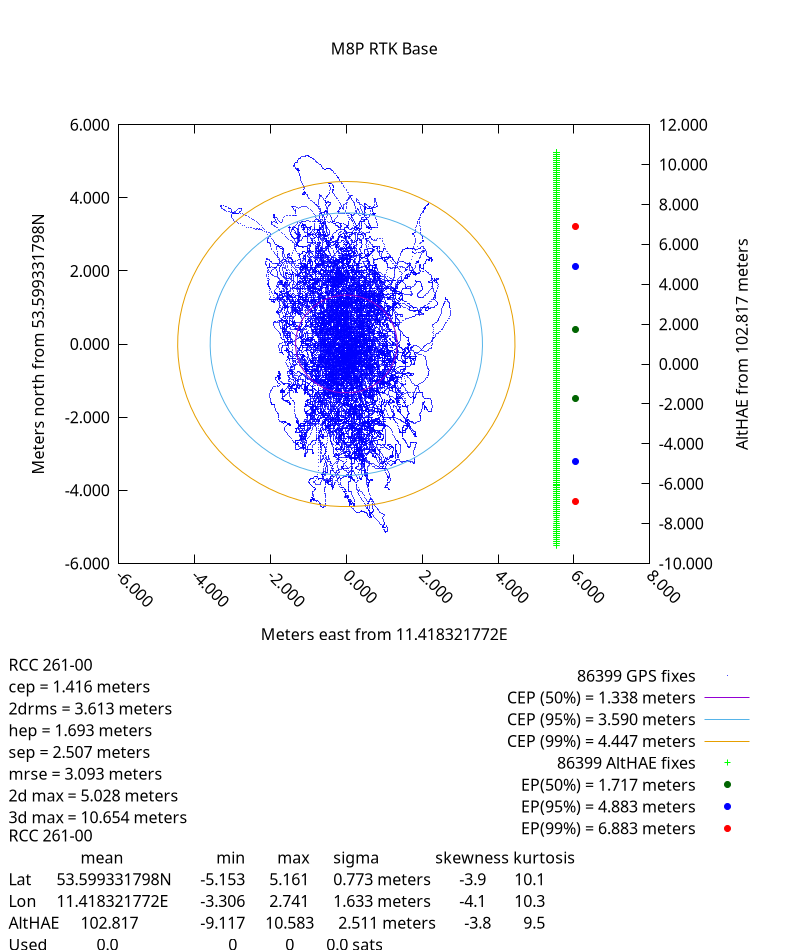
I ran gpspipe for 24h and created a plot with it following https://gpsd.gitlab.io/gpsd/gpsprof.html.
Here are the results:
Once we have tested the rover outside of the building I will give an update to that too.
Regards
Florian
Yo Florian! On Tue, 16 Aug 2022 09:25:48 +0200 Florian Kiera <florian.kiera@logicway.de> wrote:Hello Gary! Am 11.08.22 um 21:42 schrieb Gary E. Miller:Yo Florian! On Wed, 10 Aug 2022 10:49:24 +0200 Florian Kiera <florian.kiera@logicway.de> wrote:Which are not precise enough for what you are doing. Just look at what cgps is telling you. That is much more "precIse" than some random wiebdite.That pretty much seems to be the issue already... the internet translators seem to have some issues with calculating the latitude correctly. cgps worked fine and gave the expected position.Then you missed my point. They can all be correct, and different.Yet they calculated Latitude somehow "wrongly". (wrong by multiple kilometers) I understood that it can have some deviations. Still I would expect them to be in a meter scale and not kilometer. I would like to stick with the fact that cgps does it right and I am happy to use it.There are USGS grid scales that differ by up to 3 meters. My expectations are not as optimistic as yours. If gpsd, by way of cgps, works for you, great. cgps does not cumpte anything, it just passes on what gpsd tells it.Latitude: 53.59931 11.41833Determined how?With the position of the rover.I don't think you understood my question. How do you know the "accurate" position of the rover?Using a map. It can either be OpenStreetMaps or Google Maps. Both end up in the same spot (roughly where our "repeater source antenna" is positioned) with the Lat/Long I provided. Also the base has nearly the same coordinates as the base-antenna is close to the rover-repeater antenna.There you go. That is what "repeaters" do, they repeat what the repeater sees. Not good for precision work.Considering the base was not that wrong after all we can go back to the RTK base-rover scenario.How wrong? How do you know how wrong?cgps gave the right position and therefore hardly can produce gibberish RTMC3.Ah, lost me. cgps has no effect on the RTCM3 from your base. RTCM3 is gibberish by design...A right position is determined in my opinion by taking the Lat/Long to a map and actually end up in the position where I actually stand at.Google maps are not known for their accuracy. Go find a benchmrk. And the accuracy varies minute by minute, so you need to run gpsprof for many hours to determine your real performance.In this scenario I expect Lat/Long values which when used on a map end up close to where the antennas (base antenna and gps repeater antenna for the rover) are positioned on the roof.We already agree your repeater is messing up your measurements, and yet you still use it?I start the survey-in as described in the first mail and than start str2str from the RTKLib to push the RTCM3 messages to the running ntripcaster.Which can work, but there are easier wasys to get the same retuls.Is it documented? I would always prefer easier ways when they produce the same outcome. We do want to use a NTRIP caster tho.Not docuemnted by gpsd, but it should be in the u-blox manuals. Just read the raw RTCM3 from the base, and nectcat (nc) it to the rover. That is what most do for short range stuff.The latitudeon the rover was accurate but the longitude was a bit off (~20m).Once again, you do not use "accurate" propertly. I'm guessing your repeater antenna is 20 m away?I understand that the position of the repeater is "repeated". So the rover should think it is at the position of the gps repeater antenna.Sort of. There are other effects in play. Too many to correct for.The antenna is like 4m above and 5m in a horizontal direction away. The offset probably comes from the fact that the rover antenna obtains values not only from the repeater but from outside the building as well.Yeah, that will royally confuse your rover. I have played with feeding 2 antennas into one GPS, The results are not pretty.The offset actually goes in the direction of the windows. (shortest way inside the building) The rover thinks it is 20m outside the building in that direction while it *should* think its on the roof of the building.Then maybe you need to rethink "should" considering your data does not match your expectations.We are going to test the rover outside the building soon and hopefully receive what we expected all along.Hopefully.I used the latitude and longitude that gpsd gave out in google maps which gave me the visual offset on the map.Not exactly a high precision method.If the Lat/Long isnt precise/accurate enough to be used on a map what are they for then?Depends on what you need. If you are +/- 3 meters off 10% of the time, then that is perfectly good o navigate a ship or fly an airplane. It is not good enough to driave a car in a lane. You need to quantify what you actually need. Then run tests, like with gpsprof, to see what you are actually getting. Very few initially expect how bad a GPS position can be 2% of the time.Simply imagining where I am? This is not about a single meter.Getting under a meter with 8-series will be very hard, and certainly not with a repeater invovled. Your own data tells you this.I will add the output.Looking forward to it. Be sure to run gpsprof for at least 12 hours.I will run gpsprof today. I already added the output of the "simple", probably wrong, gpsprof run to my last email tho.Sorry, if it was there, I missed it. Dunno what you mean by "simple". Unless it runs modulo 12 hours, the data will be misleading. RGDS GARY --------------------------------------------------------------------------- Gary E. Miller Rellim 109 NW Wilmington Ave., Suite E, Bend, OR 97703 gem@rellim.com Tel:+1 541 382 8588 Veritas liberabit vos. -- Quid est veritas? "If you can't measure it, you can't improve it." - Lord Kelvin
-- ############################################################### Florian Kiera Tel: (0385) 201 000 58 Logic Way GmbH Geschäftsführer: Andreas Loerzer Mettenheimer Straße 73 HTTP: http://www.logicway.de 19061 Schwerin email: mailto:florian.kiera@logicway.de ###############################################################
| [Prev in Thread] | Current Thread | [Next in Thread] |