I have seen this a few times on Umarim boards. But I think it is more related to an issue in the i2c driver on the old lpc2148 boards. Unfortunately I never manage to trap the error with a logical analyzer or a debugger. I don't really know how to search for it, it is really random.
Gautier
Le 04/11/2014 17:26, Simon Liebold a
écrit :
Hi all,
Maybe you can help me to understand what happened past Saturday to my UAV. Just as I was bringing it in for landing it suddenly spun out of control and went down - to quickly to recover.
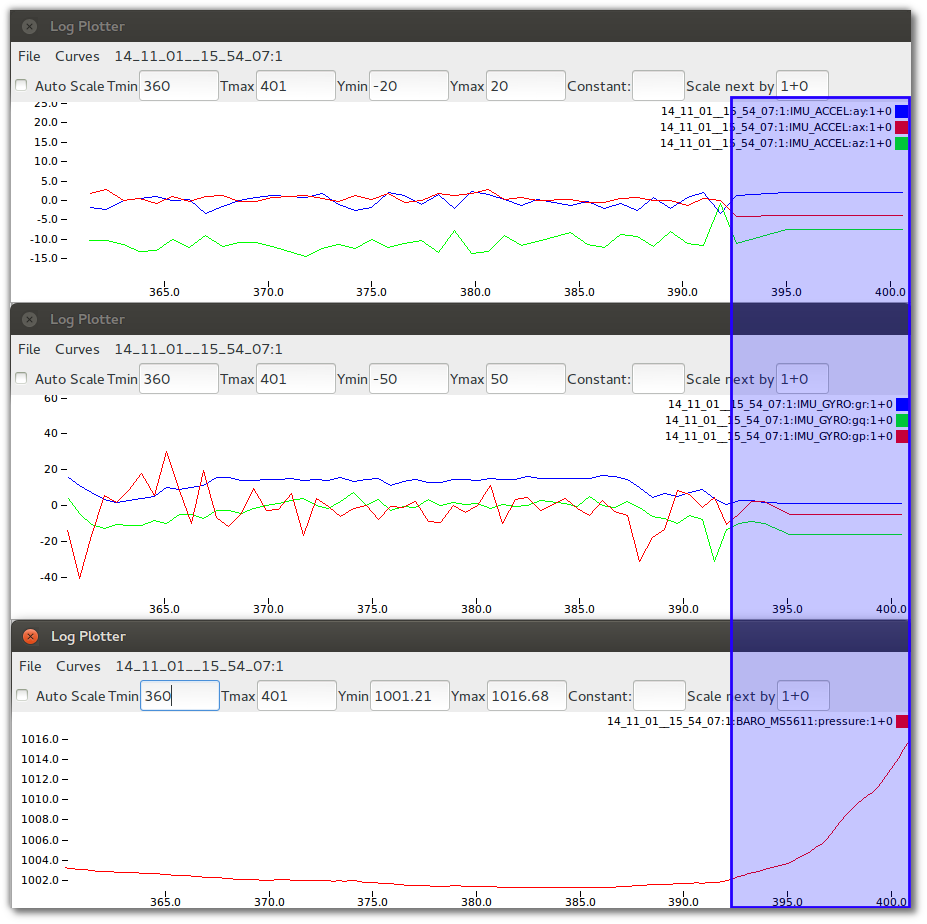
The logs show that seconds before impact the IMU_* data all lock up. In the replay the GCS is showing "IMU_LO" (probably stands for "IMU lost"):
I have never seen this before. It would explain the loss of control. But I cannot find any explanation why the sensors freeze up. It is the Umarim Lite V2 with gyroscope and accelerometer on the board. So it cannot be a connection issue.
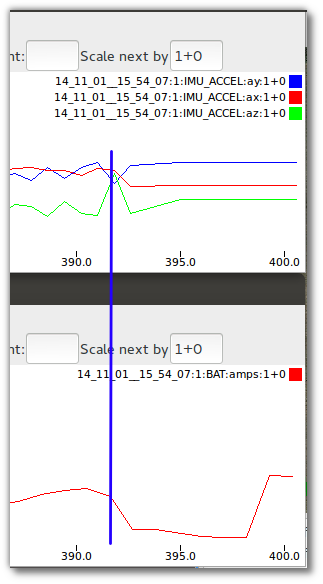
I did find one correlation though: The mishap begins just as I was pulling the power out to lose altitude:
Source state was master (with last commit dd386f1).
Has anyone an idea what could have caused it? Some sort of "out-of-tune frequency" from the ESC?
Simon
_______________________________________________ Paparazzi-devel mailing list address@hidden https://lists.nongnu.org/mailman/listinfo/paparazzi-devel