{kind=link}
Description: PNG image
|
| From: | I . Sánchez Ciarrusta |
| Subject: | Re: [Paparazzi-devel] Problems with rotorcraft |
| Date: | Fri, 18 Jul 2014 10:18:19 +0000 |
|
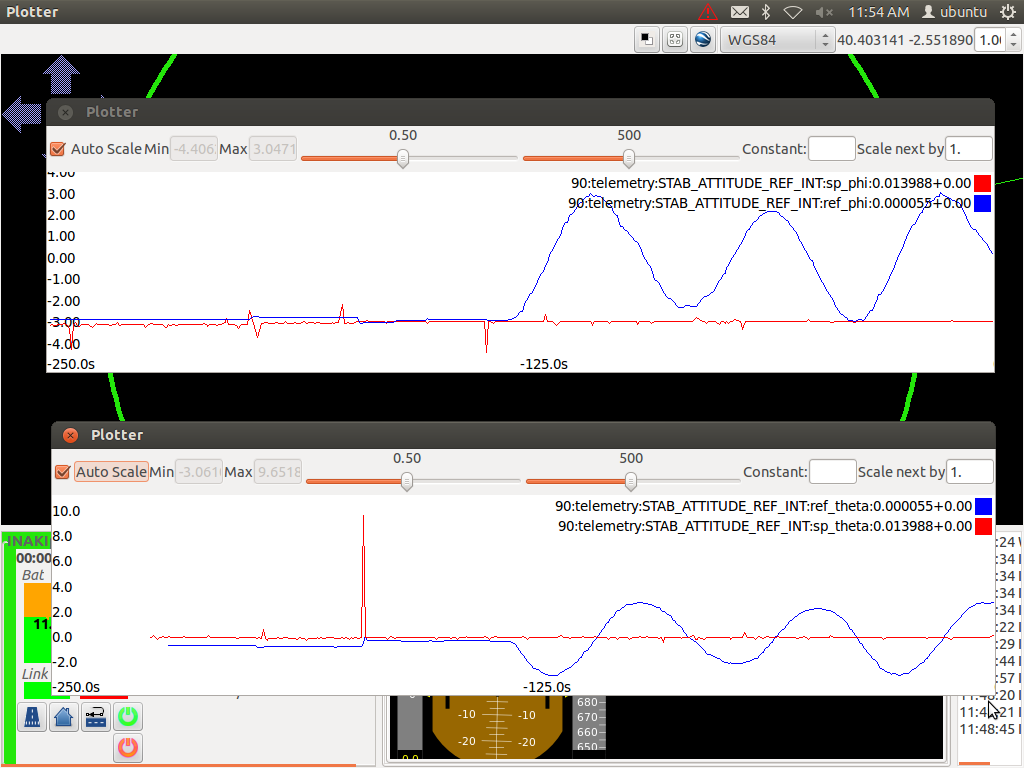
Thanks Oswald:
I think that now I have printed intertesting curves, in ATT and Rate mode. In Att mode, you can see what happens when I turn on the engines,. In Rate mode the behaviour is very different (if I have print the correct parameters). I have made both tests with the quad in the ground, with no propellers and with the trottle at minimun, and with no orders from the RC. Cheers: Inaki > From: address@hidden > To: address@hidden > Date: Fri, 18 Jul 2014 11:09:07 +0200 > Subject: Re: [Paparazzi-devel] Problems with rotorcraft > > > hi again, > > from your images, i'm not quite sure what is the relation of rc_roll and > cmd_roll? also, you seem to be in telemetry mode TUNE_HOVER which i > suppose is for tuning the vertical controller. > > what you want is > - Set telemetry mode to "attitude_loop" > > (or rate_loop if you want to tune rate mode). > > then you can see the commanded angle in > STAB_ATTITUDE_REF_INT > > and the response (measurement) in > STAB_ATTITUDE_INT > > you want to set your params s.t. these two curves match. > > > before tuning, you might want to do the following sanity check: > - tie down your copter so it can move just a bit (well, tie it down > anyway, also for tuning) > - check with the plotter wether your attitude estimation is ok at rest > (motors off) > - arm the system > - give a bit of throttle, just before takeoff or around takeoff > - observe wether the attitude estimate is still ok or wether something > runs away .. > > for tuning rate/att, the GPS isolation is irrelevant. > > bst, oswald > > I. Sánchez Ciarrusta writes: > > > Hi all: > > > > > > > > Thank you very much for your advices. > > > > > > > > I´m using 30A OPTO 30-450Hz frequency response ESCs. > > > > > > > > I have changed the gains, but in ATT mode the behaviour is not correct (it is not only due to the gains, because has an uncontrolable response) . Probably, like Oswal said, there is some fundamental thing working wrong, but I don´t know what: when I calibrate accelerometers and magnetometer seem to work well. When I command orders with RC the respose of the engines is correct. > > > > > > > > > > > > In RATE mode, the behaviour is not as bad as ATT (the 4 engines work ok), but I can´t take off due to the instability. > > > > > > > > Maybe the vibrations are the problem, but I have the LisaM and the GPS isolated , but anyway I don´t know the message on telemetry to check if is ok. > > > > > > > > I have attached two captures of th rc signals and the comands in Rc, ATT and Rate mode. > > > > > > > > I really appreciate your advice and help: there are many things that can be failing and your experience can help me a lot. Perhaps I'm making a big mistake, but I think that all the steps I'm following are appropriate. > > > > Thank you very much: > > > > > > > > Inaki > > > > > > > > > > > > > > > > > > > > > > > > > > > > > > > > > > From: address@hidden > > To: address@hidden > > Date: Thu, 17 Jul 2014 17:17:16 -0300 > > Subject: Re: [Paparazzi-devel] Problems with rotorcraft > > > > > > > > > > BTW, are you using fast ESC (490hz + refresh rate capable ) ? > > if yes, start your tests with: > > P = 600; > > I = 300; > > D = 200; > > DD = 0; > > > > > > > > > > Date: Thu, 17 Jul 2014 16:34:50 +0200 > > From: address@hidden > > To: address@hidden > > Subject: Re: [Paparazzi-devel] Problems with rotorcraft > > > > Hi, > > As Eduardo recommended, did you check vibrations? Have a look at attitude angles and rates when running motors. > > Then the pid values in example airframes should be a good starting point for tuning. > > Regards > > Loic > > > > Le 16 juil. 2014 11:43, "I. Sánchez Ciarrusta" <address@hidden> a écrit : > > > > > > > > New info: > > > > When I try Att mode, the behavior does not seem to follow any pattern. Two engines are on and the other two are off, and at random times the engines that were on stop working and vice versa. > > > > In RC mode, I have checked that the values sent by the rc and the commands are the same, I don´t know if that is correct and if the commands are directly send to the engines or suffer any change. > > > > > > > > > > > > > > > > > > > > Escribe texto o la dirección de un sitio web, o bien, traduce un documento. > > > > Cancelar > > (I know fomr the documentation that : > > Quizás quisiste decir: o si sufre alguna transformaciónppm input --(radio.xml)--> ppm_pulses[] --(radio.xml)--> radio_control.values[] --(rc_commands)--> commands[] --(command_laws,servos)--> actuators_pwm_values[] ppm out ) > > > > Thanks again: > > > > Inaki > > > > > > > > > > > > From: address@hidden > > To: address@hidden > > Date: Wed, 16 Jul 2014 07:09:28 +0000 > > Subject: Re: [Paparazzi-devel] Problems with rotorcraft > > > > > > Hi: > > > > I am trying to fly my quadcopter in manual mode (RC or ATT). > > > > As is very unstable, it is almost impossible to take off from the ground. So to have more room for maneuver, I fastened with ropes to try to take off to a certain height from the ground. > > > > Following your advice I'm trying to modify the gains until it becomes stable. > > However, I need your help because the nomenclature of the terms is not easy to understand. > > > > I do not know exactly what criteria to follow. I have thought about starting setting zero all the "i"s and "d"s, with low "p"s (changing from the GCS the values of the tabs "Att Loop" and "Rate Loop", because I guess "Horiz Loop" and "Vert Loop" have only influence in autonomous modes ). > > > > My values are: > > > > Rate Loop: > > pgain p400 > > pgain q 400 > > pgain r 350 > > > > igain p 75 > > igain q 75 > > igain r 50 > > > > ddgain p 300 > > ddgain q 300 > > ddgain r 300 > > > > > > Att Loop > > > > pgain phi 1000 > > dgain p 400 > > igain phi 200 > > ddgain p 300 > > > > pgain theta 1000 > > dgain q 400 > > igain theta 200 > > ddgain q 300 > > > > (and the same for yaw) > > > > > > I have another question: I usually fly comercial quads, very stable ones. Comercial quad copters (with NO autopiltot) have some kind of help for the stability? Why the one I am using for paparazzi is so unstable (dji f450); i have to change smth in the code? > > > > Thank you very much in advance!!! > > > > Inaki > > > > > > > > > > > > > > > > > > > > > > From: address@hidden > > To: address@hidden > > Date: Wed, 9 Jul 2014 09:50:12 +0000 > > Subject: Re: [Paparazzi-devel] Problems with rotorcraft > > > > > > Hi Alonso, > > thanks for your answer. > > > > I will try that. > > > > What is the best way for testing if the autopilot acts to control the attitude? Maybe start with AP_MODE:ATTITDE_DIRECT and then pass to "HOVER" or CF mode? > > Is there a standard procedure? > > > > Perhaps another problem is a bad vibration isolation of the board? > > > > Thanks again! > > > > > > > > > > > > Date: Tue, 8 Jul 2014 22:56:44 -0600 > > From: address@hidden > > To: address@hidden > > Subject: Re: [Paparazzi-devel] Problems with rotorcraft > > > > > > maybe you should try the mode AP_MODE_ATTITUDE_DIRECT, in this mode it does not matter if the barometer works. It is ok to use one battery as long as you are giving the Lisa/M 5V . You will not get good performance without a barometer in automatic modes. If you have a Aspirin 2.2 then it does have a barometer. Try adding this <configure name="LISA_M_BARO" value="BARO_MS5611_SPI"/> after <target name="ap" board="lisa_m_2.0"> . > > > > > > > > On Tue, Jul 8, 2014 at 3:29 AM, I. Sánchez Ciarrusta <address@hidden> wrote: > > > > > > > > > > Hi all. > > > > I have recently tried to fly a quad (in + configuration) with paparazzi, and it was impossible to fly it. > > It was really difficult to control, absolutelly unstable. > > In addition, sometimes the PFD got “frozen” (and other times responded with delay), with no apparent reason. > > We tried the hover mode, to observe if the autopilot actuated in every control, but nothing happened. > > > > We are using Paparazzi v5.1_devel, LisaM/v2 board with NO barometer, aspirin 2.2 IMU, and ublox LEA-5 GPS. > > The accelerometers and magnetometers are well calibrated. > > > > Any advice is really appreciated. > > > > Maybe is a problem because of not having barometer? Maybe the autopilot and the motors have to be alimented with separate batteries? I saw some reported problems in the mailing list, but I don´t know exactly how related are with my problem. > > > > Thanks in advance. > > > > Here is the airframe code we used: > > > > <!DOCTYPE airframe SYSTEM "../airframe.dtd"> > > > > > > > > <airframe name="Quadrotor LisaM_2.0 pwm"> > > > > <firmware name="rotorcraft"> > > <target name="ap" board="lisa_m_2.0"> > > <define name="NO_RC_THRUST_LIMIT"/> > > > > <configure name="AHRS_PROPAGATE_FREQUENCY" value="500"/> > > </target> > > > > <target name="nps" board="pc"> > > <subsystem name="fdm" type="jsbsim"/> > > <subsystem name="radio_control" type="ppm"/> > > </target> > > > > <subsystem name="motor_mixing"/> > > <subsystem name="actuators" type="pwm"> > > <define name="SERVO_HZ" value="400"/> > > > > </subsystem> > > > > <subsystem name="radio_control" type="ppm"> > > <configure name="RADIO_CONTROL_PPM_PIN" value="SERVO6"/> > > </subsystem> > > > > <subsystem name="telemetry" type="transparent"> > > <configure name="MODEM_BAUD" value="B57600"/> > > <configure name="MODEM_PORT" value="UART2"/> > > </subsystem> > > > > <subsystem name="imu" type="aspirin_v2.2"/> > > > > <subsystem name="gps" type="ublox"> > > <configure name="GPS_PORT" value="UART3"/> > > </subsystem> > > <subsystem name="stabilization" type="int_quat"/> > > <subsystem name="ahrs" type="int_cmpl_quat"> > > <define name="AHRS_GRAVITY_HEURISTIC_FACTOR" value="30"/> > > </subsystem> > > <subsystem name="ins"/> > > > > <!--define name="KILL_ON_GROUND_DETECT" value="TRUE"/--> > > <define name="TELEMETRY_MODE_FBW" value="1" /> > > </firmware> > > > > > > <modules main_freq="512"> > > > > <load name="gps_ubx_ucenter.xml"> > > <define name="GPS_UBX_NAV5_DYNAMICS" value="NAV5_DYN_PEDESTRIAN"/> > > > > </load> > > </modules> > > <servos driver="Pwm"> > > <servo name="FRONT" no="0" min="1000" neutral="1100" max="1900"/> > > <servo name="BACK" no="1" min="1000" neutral="1100" max="1900"/> > > <servo name="RIGHT" no="2" min="1000" neutral="1100" max="1900"/> > > <servo name="LEFT" no="3" min="1000" neutral="1100" max="1900"/> > > </servos> > > > > <commands> > > <axis name="ROLL" failsafe_value="0"/> > > <axis name="PITCH" failsafe_value="0"/> > > <axis name="YAW" failsafe_value="0"/> > > <axis name="THRUST" failsafe_value="0"/> > > </commands> > > > > <section name="MIXING" prefix="MOTOR_MIXING_"> > > <define name="TRIM_ROLL" value="0"/> > > <define name="TRIM_PITCH" value="0"/> > > <define name="TRIM_YAW" value="0"/> > > <define name="NB_MOTOR" value="4"/> > > <define name="SCALE" value="256"/> > > <!-- front/back turning CW, right/left CCW --> > > <define name="ROLL_COEF" value="{ 0, 0, -256, 256 }"/> > > <define name="PITCH_COEF" value="{ 256, -256, 0, 0 }"/> > > <define name="YAW_COEF" value="{ -256, -256, 256, 256 }"/> > > <define name="THRUST_COEF" value="{ 256, 256, 256, 256 }"/> > > </section> > > > > <command_laws> > > <call fun="motor_mixing_run(autopilot_motors_on,FALSE,values)"/> > > <set servo="FRONT" value="motor_mixing.commands[SERVO_FRONT]"/> > > <set servo="BACK" value="motor_mixing.commands[SERVO_BACK]"/> > > <set servo="RIGHT" value="motor_mixing.commands[SERVO_RIGHT]"/> > > <set servo="LEFT" value="motor_mixing.commands[SERVO_LEFT]"/> > > </command_laws> > > <!-- inaki he puesto mis valores--> > > <section name="IMU" prefix="IMU_"> > > <define name="ACCEL_X_NEUTRAL" value="24"/> > > <define name="ACCEL_Y_NEUTRAL" value="8"/> > > <define name="ACCEL_Z_NEUTRAL" value="264"/> > > <define name="ACCEL_X_SENS" value="4.93314498567" integer="16"/> > > <define name="ACCEL_Y_SENS" value="4.86671471234" integer="16"/> > > <define name="ACCEL_Z_SENS" value="4.86346803582" integer="16"/> > > > > <!-- REEMPLAZADO POR MI CALIBRACION INAKI --> > > <define name="MAG_X_NEUTRAL" value="8"/> > > <define name="MAG_Y_NEUTRAL" value="-12"/> > > <define name="MAG_Z_NEUTRAL" value="35"/> > > <define name="MAG_X_SENS" value="3.53511175627" integer="16"/> > > <define name="MAG_Y_SENS" value="3.49864611794" integer="16"/> > > <define name="MAG_Z_SENS" value="3.96410626337" integer="16"/> > > > > <define name="BODY_TO_IMU_PHI" value="0." unit="deg"/> > > <define name="BODY_TO_IMU_THETA" value="0." unit="deg"/> > > <define name="BODY_TO_IMU_PSI" value="0." unit="deg"/> > > </section> > > > > <section name="AHRS" prefix="AHRS_"> > > <define name="H_X" value="0.3770441"/> > > <define name="H_Y" value="0.0193986"/> > > <define name="H_Z" value="0.9259921"/> > > </section> > > > > <section name="INS" prefix="INS_"> > > </section> > > > > <section name="STABILIZATION_RATE" prefix="STABILIZATION_RATE_"> > > <!-- setpoints --> > > <define name="SP_MAX_P" value="10000"/> > > <define name="SP_MAX_Q" value="10000"/> > > <define name="SP_MAX_R" value="10000"/> > > <define name="DEADBAND_P" value="20"/> > > <define name="DEADBAND_Q" value="20"/> > > <define name="DEADBAND_R" value="200"/> > > <define name="REF_TAU" value="4"/> > > > > <!-- feedback --> > > <define name="GAIN_P" value="400"/> > > <define name="GAIN_Q" value="400"/> > > <define name="GAIN_R" value="350"/> > > > > <define name="IGAIN_P" value="75"/> > > <define name="IGAIN_Q" value="75"/> > > <define name="IGAIN_R" value="50"/> > > > > <!-- feedforward --> > > <define name="DDGAIN_P" value="300"/> > > <define name="DDGAIN_Q" value="300"/> > > <define name="DDGAIN_R" value="300"/> > > </section> > > > > > > <section name="STABILIZATION_ATTITUDE" prefix="STABILIZATION_ATTITUDE_"> > > <!-- setpoints --> > > <define name="SP_MAX_PHI" value="45." unit="deg"/> > > <define name="SP_MAX_THETA" value="45." unit="deg"/> > > <define name="SP_MAX_R" value="90." unit="deg/s"/> > > <define name="DEADBAND_A" value="0"/> > > <define name="DEADBAND_E" value="0"/> > > <define name="DEADBAND_R" value="250"/> > > > > <!-- reference --> > > <define name="REF_OMEGA_P" value="400" unit="deg/s"/> > > <define name="REF_ZETA_P" value="0.85"/> > > <define name="REF_MAX_P" value="400." unit="deg/s"/> > > <define name="REF_MAX_PDOT" value="RadOfDeg(8000.)"/> > > > > <define name="REF_OMEGA_Q" value="400" unit="deg/s"/> > > <define name="REF_ZETA_Q" value="0.85"/> > > <define name="REF_MAX_Q" value="400." unit="deg/s"/> > > <define name="REF_MAX_QDOT" value="RadOfDeg(8000.)"/> > > > > <define name="REF_OMEGA_R" value="250" unit="deg/s"/> > > <define name="REF_ZETA_R" value="0.85"/> > > <define name="REF_MAX_R" value="180." unit="deg/s"/> > > <define name="REF_MAX_RDOT" value="RadOfDeg(1800.)"/> > > > > <!-- feedback --> > > <define name="PHI_PGAIN" value="1000"/> > > <define name="PHI_DGAIN" value="400"/> > > <define name="PHI_IGAIN" value="200"/> > > > > <define name="THETA_PGAIN" value="1000"/> > > <define name="THETA_DGAIN" value="400"/> > > <define name="THETA_IGAIN" value="200"/> > > > > <define name="PSI_PGAIN" value="500"/> > > <define name="PSI_DGAIN" value="300"/> > > <define name="PSI_IGAIN" value="10"/> > > > > <!-- feedforward --> > > <define name="PHI_DDGAIN" value="300"/> > > <define name="THETA_DDGAIN" value="300"/> > > <define name="PSI_DDGAIN" value="300"/> > > </section> > > > > <section name="GUIDANCE_V" prefix="GUIDANCE_V_"> > > <define name="MIN_ERR_Z" value="POS_BFP_OF_REAL(-10.)"/> > > <define name="MAX_ERR_Z" value="POS_BFP_OF_REAL( 10.)"/> > > <define name="MIN_ERR_ZD" value="SPEED_BFP_OF_REAL(-10.)"/> > > <define name="MAX_ERR_ZD" value="SPEED_BFP_OF_REAL( 10.)"/> > > <define name="MAX_SUM_ERR" value="2000000"/> > > <define name="HOVER_KP" value="150"/> > > <define name="HOVER_KD" value="80"/> > > <define name="HOVER_KI" value="20"/> > > <define name="NOMINAL_HOVER_THROTTLE" value="0.6"/> > > <define name="ADAPT_THROTTLE_ENABLED" value="TRUE"/> > > </section> > > > > <section name="GUIDANCE_H" prefix="GUIDANCE_H_"> > > <define name="MAX_BANK" value="20" unit="deg"/> > > <define name="USE_SPEED_REF" value="TRUE"/> > > <define name="PGAIN" value="50"/> > > <define name="DGAIN" value="100"/> > > <define name="AGAIN" value="100"/> > > <define name="IGAIN" value="20"/> > > </section> > > > > <section name="SIMULATOR" prefix="NPS_"> > > <define name="ACTUATOR_NAMES" value="{"front_motor", "back_motor", "right_motor", "left_motor"}"/> > > <define name="JSBSIM_INIT" value=""reset00""/> > > <define name="JSBSIM_MODEL" value=""simple_quad""/> > > <define name="SENSORS_PARAMS" value=""nps_sensors_params_default.h""/> > > <!-- mode switch on joystick channel 5 (axis numbering starting at zero) --> > > <define name="JS_AXIS_MODE" value="4"/> > > </section> > > > > <section name="AUTOPILOT"> > > > > <define name="MODE_MANUAL" value="AP_MODE_KILL"/> > > <define name="MODE_AUTO2" value="AP_MODE_NAV"/> > > <define name="MODE_AUTO1" value="AP_MODE_RC_DIRECT"/> > > > > </section> > > > > <section name="BAT"> > > <define name="CATASTROPHIC_BAT_LEVEL" value="9.3" unit="V"/> > > <define name="CRITIC_BAT_LEVEL" value="9.6" unit="V"/> > > <define name="LOW_BAT_LEVEL" value="10.1" unit="V"/> > > <define name="MAX_BAT_LEVEL" value="12.4" unit="V"/> > > <define name="MILLIAMP_AT_FULL_THROTTLE" value="30000"/> > > </section> > > > > </airframe> > > > > _______________________________________________ > > Paparazzi-devel mailing list > > address@hidden > > https://lists.nongnu.org/mailman/listinfo/paparazzi-devel > > _______________________________________________ > Paparazzi-devel mailing list > address@hidden > https://lists.nongnu.org/mailman/listinfo/paparazzi-devel |
![]() rate.png
rate.png
Description: PNG image
![]() att.png
att.png
Description: PNG image
| [Prev in Thread] | Current Thread | [Next in Thread] |
{kind=link}