{kind=link}
Description: PNG image
|
| From: | Michal Podhradsky |
| Subject: | Re: [Paparazzi-devel] Quadrotor with Lia 1.1 - a sudden loss control authori |
| Date: | Mon, 12 Nov 2012 12:41:02 -0700 |
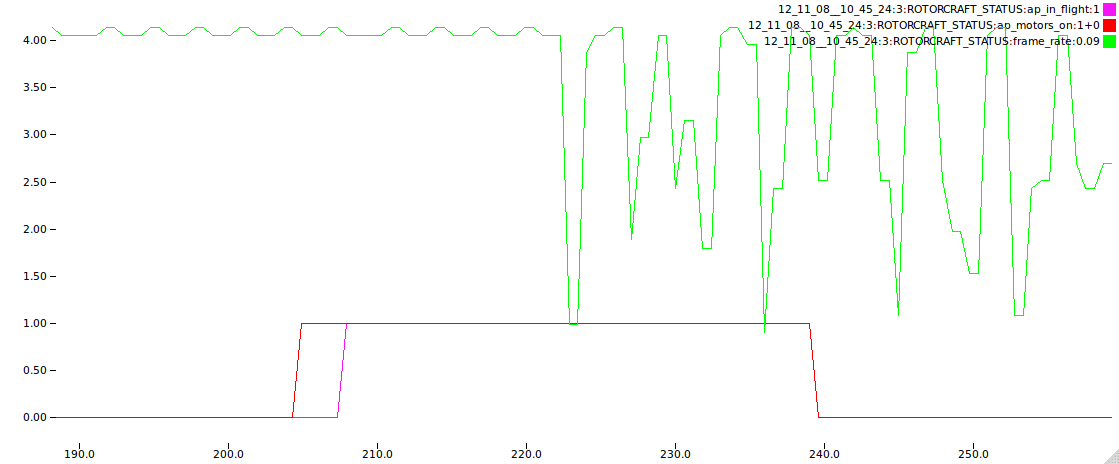
Hi Michal,this is very strange...Whether you use the adaptive hover throttle or set a fixed NOMINAL_HOVER_THROTTLE makes no difference in the DIRECT vertical mode, it just takes the RC input and directly applies that to the thrust command: https://github.com/paparazzi/paparazzi/blob/v4.0/sw/airborne/firmwares/rotorcraft/guidance/guidance_v.c#L177So that should be fine..From the plot, it doesn't look like the thrust command from the RC was put to 100%, which is very weird.I guess you didn't log the RADIO_CONTROL or RC messages in that flight?Did you take a look at rc_status, frame_rate, ap_in_flight and ap_motors_on in the ROTORCRAFT_STATUS message? (Just to make really sure these are ok)Could you please post your full config and flight logs?
Cheers, FelixOn Fri, Nov 9, 2012 at 10:30 PM, Michal Podhradsky <address@hidden> wrote:
Hi Loïc,
I am attaching the logs:
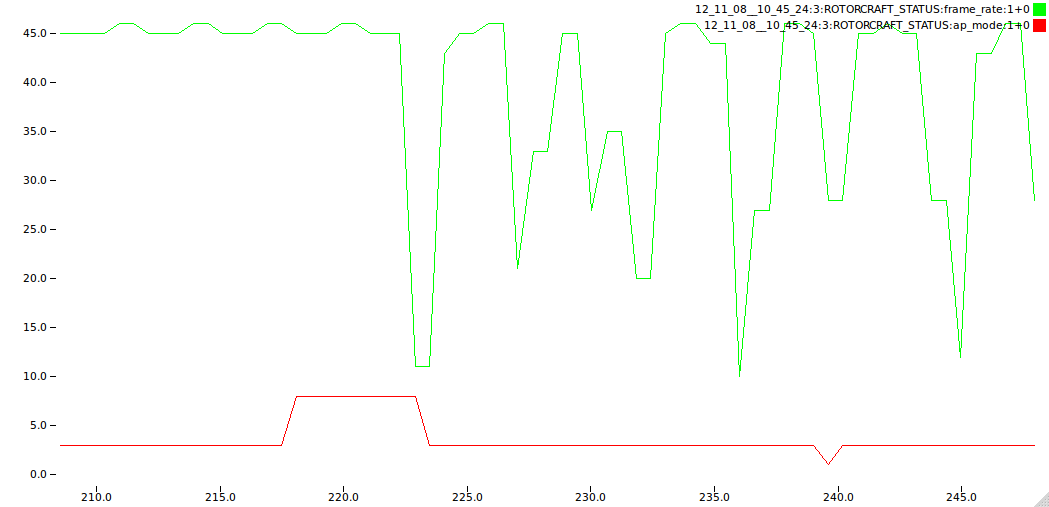
1) AP mode and Vertical mode vs. thrust command (scaled to fit). It is not obvious for the first sight, but after going from Z_HOLD(8) to ATT(3) our RC pilot was pulling throttle even up to 100% trying to keep the plane in the air, but it is not reflected in the plot until the last moment - right before the landing (t=239s)
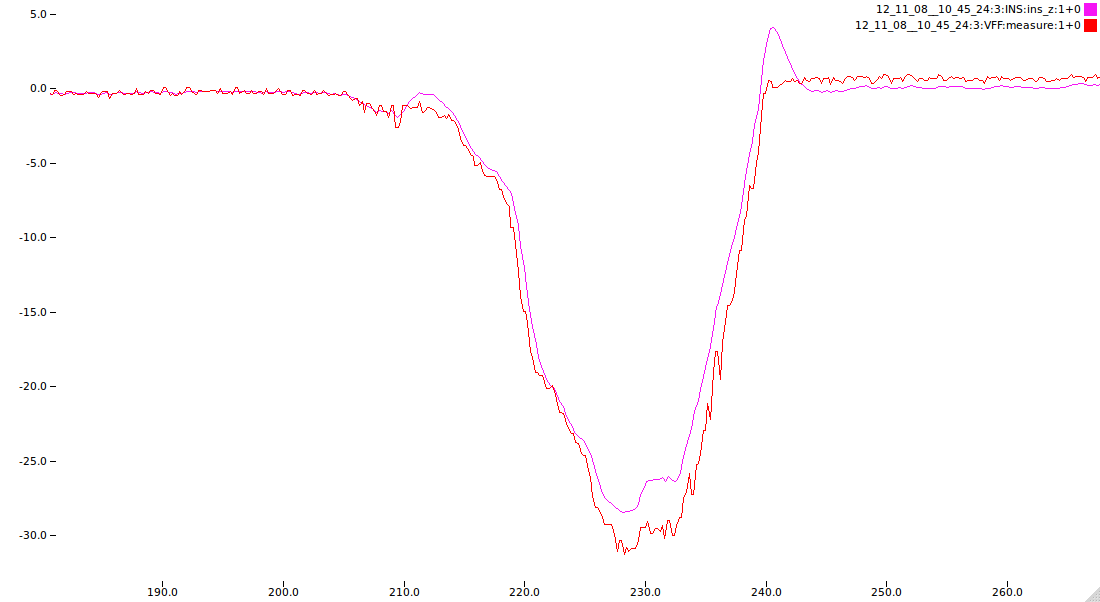
2) Vertical loop - est_z, est_zd, est_zdd and AP mode. You can see the quad was climbing rapidly during Z_HOLD, and then started to descend after switching to ATT.
Regards
MichalOn Fri, Nov 9, 2012 at 1:06 AM, Loic Drumettaz <address@hidden> wrote:_______________________________________________Hi,I never experienced such issue. I don't use adaptative estimator for thrust, but NOMINAL_THROTTLE instead (see Paparazzi vertical loops wiki page). From my experience, it is sometime difficult to switch from RC_CLIMB mode to DIRECT mode for the pilot, because of the sudden change of throttle required to hover.Maybe could you post your logs?RegardsLoïc
Paparazzi-devel mailing list
address@hidden
https://lists.nongnu.org/mailman/listinfo/paparazzi-devel
_______________________________________________
Paparazzi-devel mailing list
address@hidden
https://lists.nongnu.org/mailman/listinfo/paparazzi-devel
_______________________________________________
Paparazzi-devel mailing list
address@hidden
https://lists.nongnu.org/mailman/listinfo/paparazzi-devel
![]() 3-baro_abs-est_z.png
3-baro_abs-est_z.png
Description: PNG image
![]() 4-frame_rate-motors_on-in_flight.png
4-frame_rate-motors_on-in_flight.png
Description: PNG image
![]() 5-ap_mode-frame_rate.png
5-ap_mode-frame_rate.png
Description: PNG image
| [Prev in Thread] | Current Thread | [Next in Thread] |
{kind=link}
{kind=link}